|
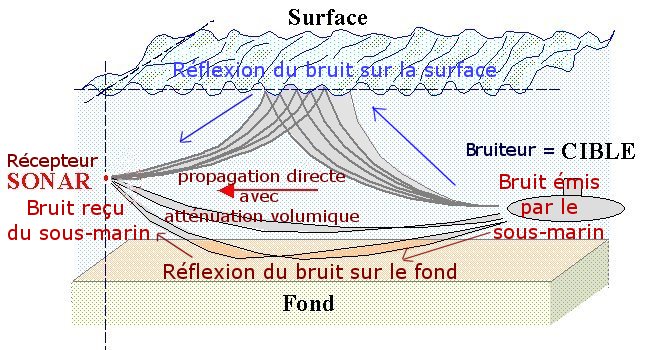
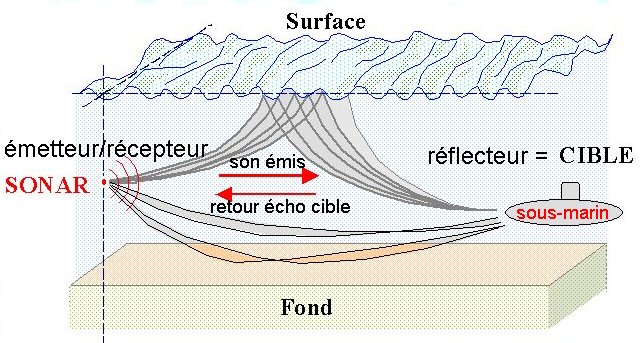
Grâce à la propagation du son dans l'eau
(toujours 5
fois plus rapide que dans l'air) , les rayons sonores vont pouvoir
révéler, pour un SONAR actif, après reflexion sur la cible, la présence
d'un sous-marin , après un trajet aller et retour de l'implulsion sonore émise dans l'eau.
Comme en mode passif,
la nature du fond (sable, vase, rochers,...) et l'agitation de la
surface de la mer vont jouer sur les pertes de propagation (et cette
fois-ci doublement, car il y a aller ET retour de
l'impulsion SONAR), en affaiblissant plus ou moins le signal à détecter
avant son arrivée sur le récepteur SONAR. (Cette propagation est
illustrée simplement sur le petit dessin ci-dessus).
L'équation du SONAR ACTIF va nous permettre, dans ce cas, d'évaluer la DISTANCE en km à laquelle un SONAR détectera (avec une
certaine probabilité) une CIBLE,
en précisant dans quelles conditions a lieu cette détection
: quels réglages pour le SONAR et pour quelles
caractéristiques de
la CIBLE ( index de cible à la réflexion de
l'impulsion SONAR, ou T.S. pour "Target
Strength"
en dB) . En actif, le fait que la cible soit bruyante ou non importe
peu, c'est surtout la force de la réflexion de l'impulsion SONAR qui la
trahira , pas son niveau de bruit (bien plus faible en général que
l'écho renvoyé au SONAR actif).
Comme en passif, le bruit ambiant (trafic maritime,
bruit des vagues,
bruits biologiques de toutes sortes) va gêner la bonne réception du
signal : les traitements d'antenne (on peut n' écouter que dans
certaines directions - c'est comme si l'on tendait l'oreille dans une
direction précise) et les algorithmes de traitement du signal (filtrage
fréquentiel et spatial de tous les bruits parasites), vont aider le
SONAR actif à s'en affranchir.
Le SONAR actif détectera la cible dès que le
niveau de l'écho de la cible sera suffisamment fort par rapport à ce
que l'on peut considérer globalement comme la somme du "bruit de fond"
et du seuil de déclenchement (réglage de sensibilité) de la détection.
Dans un premier temps, l' équation du SONAR actif donne
la valeur de l'excès de Signal (S.E.
ou Signal Excess en dB) en réception SONAR, après
traitement (gains, Pertes, et Seuil de détection comme en passif). Cet
excès de Signal doit être effectivement positif pour correspondre à une
détection de la cible; dans un 2ème temps, un modèle de propagation (complexe ou simplifié, comme pour le mode passif ) nous permettra de
transformer la perte de propagation TL (en dB) correspondant à un S.E. = 0 dB
(détection de justesse, S/B=0) en une distance (ou Portée de détection
du SONAR), exprimée en km. Cette correspondance TL / distance est assez
variable, et dépend -comme en passif- du lieu (quel Océan , quelle
profondeur de fond, etc... ?) et des conditions d'environnement du jour
(température de l'eau de mer, vent, etc...) où la détection SONAR se
passe ...
Voici cette équation : pour avoir détection
de la cible ,
le S/B ou Excès de Signal (SE) à la réception dans le SONAR, et après
traitement, doit être positif, soit :
SE = SL + TS - 2*TL - NL + DI + PG - DT -
PL >
0 (dB)
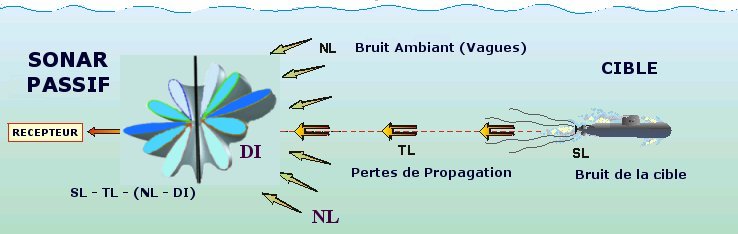
ces termes, qui vont être
détaillés ci-après se retrouvent aussi sur le petit schéma illustré ci-dessous :
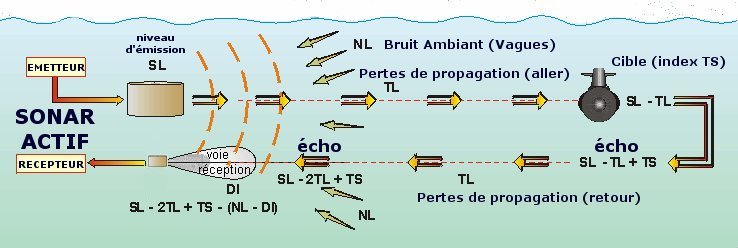
Sur ce schéma, on voit successivement que :
- Le niveau émis par le SONAR dans l'eau est
SL (en dB , NIS) , niveau émis pendant une
durée Te (en s), sur une bande de fréquence B, en modulation
FM autour de la fréquence centrale de l'émetteur.
- que l'impulsion émise se propage vers la cible en
perdant de l'énergie (pertes TL du trajet
aller), en dB (en 20*Log(r) par exemple...
- Qu'arrivée avec un niveau SL -TL sur la cible
(d'index "TS" ou "Target Strength" en dB
), elle en repart sous la forme d'un écho
- Echo dont le niveau est alors SL -TL +TS en dB ,
- Puis, proche de l'antenne de réception, l'écho,
affaibli par les pertes de propagation TL (les mêmes quà l'aller) du trajet retour, ne vaut plus que : Echo Level = SL -2*TL
+TS
- et, après l'antenne dont la directivité DI élimine une bonne partie du bruit ambiant (pas le signal utile car elle
est bien pointée vers la cible à ce moment-là), l' écho vaut SL -2*TL +
TS -(NL-DI) à l'entrée du récepteur
- à l'entrée du récepteur du SONAR actif, EL echo level
= SL - 2*TL - (NL - DI) : et, comme en passif, à
ce niveau, la détection n'est pas encore faite, car c'est dans le
récepteur que cette détection est faite, après application
des gains (PG) et pertes (PL) de traitement, et d'un seuil DT actif
:
Explicitons aussi en actif quelles sont les variables
utilisées : 1er terme : SL : c'est
maintenant, dans ce mode, le niveau d'émission du SONAR actif (Source
Level,
en dB NIS , Niveau Isotropique Spectral, exprimé en dB ref 1uPa/VHz
comme toutes les valeurs en dB des bruits et signaux de cette page) :
par exemple 220 dB à 6 kHz pour un SONAR
cylindrique de coque, avec une impulsion d' émission de 2 s
et une bande FM de 500 Hz (c'est un SONAR de coque typique des navires ASM), et nous ferons ce calcul à 6000 Hz pour toute l'équation de
cet exemple de SONAR actif.
Deuxième terme : TS ,
l'index de cible (en
dB) : Il traduit la réflexivité de la cible par rapport à l'impulsion
SONAR reçue . (TS est le rapport de l'énergie renvoyée sur l'énergie
incidente, il vaut 10 dB par exemple pour une sphère immergée de 1m de
rayon ) . Un gros sous-marin vu par le travers (son coté droit ou gauche) aura un index d'environ 15 à 30 dB, selon qu'il aura été équipé ou non d'un revêtement anéchoïque et selon la fréquence de l'impulsion SONAR. Une valeur "optimiste" de cet index de cible peut donc être
de 14 dB par exemple, pour un sous-marin diesel classique de taille moyenne, vu par le travers
+/-30°, à notre fréquence d'exercice ici 6 kHz, et nous prendrons cette valeur ici pour illustrer l'équation
active.
3ème terme : TL (Transmission Losses), les pertes
de propagation(en dB) : Comme en passif, ce terme représente d'affaiblissement du
signal au cours de sa propagation sous-marine, affaiblissement dû à la
fois à la divergence géométrique (divergence sphérique en grands fonds,
cas considéré ici, pour simplifier le calcul, TL=20*Log(r) ), et à l'absorption (ou atténuation
volumique, qui est dûe à la transformation d'une partie du son en
chaleur). Mais en actif, on aura 2 fois cette valeur de TL en
affaiblissement de l'impulsion SONAR : 1er trajet vers la cible, et
retour de l'écho de cette cible au SONAR. En réalité, même dans un mode de calcul simplifié, il faudrait faire succéder à la divergence sphérique ici choisie permanente pour simplifier le calcul, une deuxième phase, celle de la divergence cylindrique -en 10*Log(r) seulement- , correspondant à toute la zone géométrique du calcul à partir du moment où les rayons émis par le SONAR ont rencontré le fond. Cela aurait pour effet d'augmenter la distance de détection trouvée pour le SONAR actif. Une future page consacrée à ce terme TL pourrait être envisagée si nécessaire ...
4ème terme : NL (Noise Level) : Le bruit
(total) : En mer,
le bruit ambiant (généré par le trafic maritime, le bruit des vagues,
les bruits biologiques de toutes sortes), les bruits propres ou
rayonnés (cela dépend de la configuration exacte de l'équipement) dûs
au porteur du SONAR ou à l'écoulement de l'eau de mer à la surface de
l'antenne vont gêner la bonne réception du signal : Le signal risque
fort d'être noyé dans le bruit et on aura du mal à repérer l' écho de la cible perdu dans un bruit de fond et une réverbération très forts ! Quelques chiffres : Pour une mer peu agitée (état
de mer 3 par exemple, vent force 4, en été en Atlantique à l'ouest de
l'Angleterre par exemple), le niveau NIS du bruit ambiant dû aux vagues
est environ de 51 dB (à 6 kHz). Pour le
cas qui nous
concerne ici, se rajoute à ce bruit des vagues, le bruit d'écoulement
de l'eau sur les parois de l'antenne du SONAR, bruit qui est d'autant
plus élevé que le navire va vite ... On peut ajouter facilement 10 dB
pour une vitesse de 10 à 15 Nds, cf URICK doc cité en ref page biblio),
soit un bruit total de 61 dB pris ici pour
cet exemple en actif.
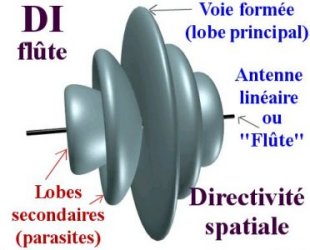
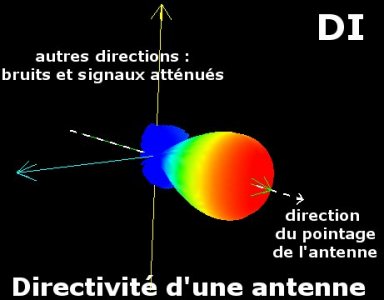
| 5ème terme : DI : l'
Index de
Directivité de l'antenne de réception du SONAR actif : les traitements
d'antenne (on peut n' écouter que dans certaines directions, on dit que
l'on forme des voies, c'est comme si l'on tendait l'oreille dans une
direction précise) et les algorithmes de traitement du signal (filtrage
fréquentiel et spatial de tous les bruits parasites), vont aider le
SONAR à s' affranchir des bruits parasites. L' amélioration que l'on peut obtenir en diminuant le niveau du bruit reçu grâce à cette focalisation de la réception dans une direction donnée s'appelle DIRECTIVITE, et s'écrit DI dans l' équation.Ce DI est exprimé en dB et représente le gain
apporté par l'antenne sur le bruit environnant (le bruit
ambiant total sera affaibli de cet index, alors que l'écho utile ne
sera pas atténué, la voie du SONAR pointant bien sur lui (c'est le
"bien pointé" des sonaristes et des canonniers) : exemple pour une
antenne cylindrique bien construite pour cette
fréquence, et que nous choisirons pour illustrer cet exemple, une valeur de DI
possible = 20 dB à 6000 Hz. L' image ci-contre permet de se représenter une telle
directivité dans l'espace , le pointage électronique de la voie de
réception permet de minimiser les bruits parasites sans affaiblir le
signal utile (ici l' écho de la cible, en mode actif). |
 |
6ème terme : le gain PG (Processing Gain) apporté
par le
traitement FM (son intégrateur) de ce SONAR actif : 10*Log(Te) (avec Te
durée de l' émission, 2s ici) en bruit dominant, ce qui est souvent le
cas en limite de portée, soit PG = 10*Log(2) = 3 dB .
On peut bien imaginer que plus l' impulsion émise dure longtemps, plus
l' écho en retour durera, et l'intégrateur du récepteur pourra
accumuler plus de signal utile, par rapport au bruit ambiant qui lui
reste constant : d'où le gain en 10*Log(Te). En général, on va écouter
les bruits de chaque direction de l'espace sous-marin pendant un
certain temps (eh oui, il n'y a pas que le fût du canon qui ...) que
l'on met à profit pour accumuler les signaux intéressants qui en
s'additionnant (on appelle cela une intégration temporelle) vont gagner
sur le bruit qui reste la référence de non détection (on parle de
rapport signal à bruit pour qualifier une détection : un S/B de 1 dB
est faible, 3 dB moyen, et 10 dB c'est très bon ... ( 3 dB cela veut
dire 2 fois + fort , car 10*Log(2)=3 dB , et 10 dB c'est 10 fois plus
fort : 10*Log(10)=10 dB ) ...
7ème terme : le seuil de détection DT : Le
SONAR
détectera la cible dès que le niveau du bruit spécifique de la cible
(reçu par le récepteur SONAR) sera suffisamment fort par rapport à ce
que l'on peut considérer globalement comme la somme du "bruit de fond"
et du seuil de déclenchement (règlage de sensibilité) de la détection.
Ce seuil , statistique, nommé seuil de détection (DT
en anglais dans le texte pour Detection Threshold),
dépendra de la valeur que l'on choisira pour les probabilités de
détection Pd et de fausse alarmes Pfa que l'on tolèrera (cela
correspond à autoriser +/- d'erreurs de détections , et plus on
s'autorise d'erreurs, plus le seuil DT à utiliser dans l'équation
baissera : On détectera donc dans ce cas plus souvent quelquechose,
mais ce ne sera pas forcément un vrai bruiteur ... c'est un compromis :
Si l'on tolère très peu d'erreurs de détection -Pd élevée et Pfa faible
par exemple- le seuil DT sera plus élevé, on détectera donc moins
souvent, mais dans ce cas, ce sera très probablement une vraie cible
... En actif, dans ce seuil, intervient aussi la largeur de la bande de
fréquence FM émise et reçue, et le temps d'intégration utilisé dans le
récepteur, qui peut faire gagner en S/B et réduire ce seuil DT...
En mode ACTIF FM, par exemple -cas d'école- pour une
probabilité de détection de 90% et une probabilité de fausse alarme de
1 pour 10000, et avec une bande FM de 500 Hz et une durée de
post-intégration de 10 ms, ce seuil DT vaut environ 15
dB, on le lit sur des courbes standard (cf littérature
citée en page Questions/Réponses) . On
utilisera donc cette valeur dans cette application numérique du SONAR
ACTIF FM.
8ème et dernier terme : PL , les pertes de
traitement ou "Processing Losses" : Dans tout matériel et dans tout
traitement du signal (programmes informatiques filtrant les signaux
reçus en fréquences et en directions), il y a des imperfections. Elles
peuvent être chiffrées et prises en compte dans ces équations du SONAR,
et ainsi rendre plus réalistes les distances calculées en les
utilisant. Exemple d'imperfections : L'effet du roulis / tangage sur le
SONAR (surtout les SONARs de coque) , le recouvrement non parfait des
voies de réception en passant d'une direction à la suivante
(les "Scalloping Losses"), les variations de sensibilité des capteurs
élémentaires de la flûte choisie ici , etc... On peut arriver rapidement à 4 dB (ou plus) , et ce sera la valeur exemple prise
ici pour ce calcul.
Application Numérique :
pour obtenir la
portée de détection, on suppose que S.E. = 0 (c'est l'ultime limite où
il y aura détection, l'excès de signal tombant à 0 à ce moment là
--> on a donc : TL
= 1/2*[220 (SL) + 14(TS)- 61 (NL) + 20 (DI) + 3 (PG) - 15 (DT) - 4
(PL)] = 88,5 dB , perte maximale possible (1 trajet) pour avoir une détection à partir
de ce SONAR actif, sur un sous-marin qui passerait à proximité , avec
l'orientation (travers +/- 30°) citée dans le paragraphe sur le TS.
TL que l'on va transformer
en distance (r, en
mètres) dans cet exemple comme pour le passif plus haut, grâce à un
modèle ultra-simplifié et théorique de pertes de propagation : celui de
la propagation sphérique en 20*Log (r) + alpha*r , bien adapté aux
grands fonds (blue waters) - Notons au passage que le terme alpha est
un coefficient d' atténuation volumique qui traduit le fait qu'une
partie de l'énergie sonore se dissipe en chaleur au cours de la
propagation du son, cette énergie est donc perdue, et elle fait partie
de ce terme TL que l'on est en train de calculer). Ce coefficient alpha
dépend principalement de la fréquence du signal, et est donné en dB/km
: à notre fréquence de 6000 Hz, il n' est plus faible comme à 1000 Hz,
et vaut de l'ordre de 0,5
dB/km et ne sera donc pas négligé :
on a donc : TL pour la détection maximale (Portée r)
= 20*Log(r) + 0,5*r = 88,5 dB
--> soit r = 12 800 m environ (portée = 12,8 km).
D'autres modèles de propagation existent, bien plus
précis, et étalonnés à la mer,
mais aussi plus difficiles à utiliser (il faut entrer dans ces modèles
de nombreux paramètres décrivant le milieu marin à l'endroit où l'on
utilise le SONAR, pour obtenir la valeur de ce terme TL pour chaque
distance du SONAR et chaque immersion possible de la cible recherchée
...
 SYNTHESE
DU CALCUL ACTIF : SYNTHESE
DU CALCUL ACTIF :
L'équation du SONAR ACTIF nous a donc permis d'estimer
qu'
avec ce SONAR actif de coque à antenne cylindrique et le traitement
ACTIF FM en E/R de notre SONAR, on peut détecter (mais non discrètement, car l'émission SONAR
est entendue dans ce cas à + de 20 km à la ronde par les SM)
un SM classique d'index 14 dB passant par le travers à 12 800 m de
distance , ou moins (la détection sera alors meilleure , le Signal du
S/B sera plus fort car le TL sera plus faible : Cette même équation
peut encore s'écrire , comme pour le cas
passif mais avec cette fois-ci 2*TL au lieu de1*TL (aller-retour du
pulse SONAR dans le milieu marin) :
Signal Excess (ou
S/B , rapport Signal à bruit) =
SE = SL - 2TL - (NL - DI) + PG - DT - PL
Le S.E. est positif en cas de
détection, et plus la cible passera près, plus le TL sera faible, et
donc plus le S/B sera fort et la détection bonne !
Si le sous-marin fait face (ou
tourne le dos en
fuyant) à l' émission SONAR, il peut réduire son index de cible TS (le faire passer
de 14 dB à 5 dB par exemple, en moins d'une minute) et il deviendra alors indétectable (provisoirement, tant qu'il ne changera pas de cap), la portée de
détection du SONAR actif tombant dans ces conditions à 6 km seulement !
(TL= 88,5 - 1/2*9 = 84 dB --> r = 9 300 m, la portée du SONAR actif diminue de 30% !). La suite des opérations est essentiellement
dépendante
de la tactique des commandants de SM et des Navires ASM ayant détecté
ce SM ...
Une fois la première détection faite par le SONAR en
mode
actif, on effectue en général une classification du contact (degré de
confiance "POSSUB" 1 , 2 , 3 et même "CERTSUB" si le sous-marin a été
réellement vu de visu depuis le navire) , sur la détection en cours,
liée au niveau de S/B reçu, et au comportement de la cible. Ensuite on
effectue un suivi de la nouvelle piste crée (tenue de contact) , dans
le cadre d'une opération de surveillence ou d'une autre manoeuvre de la
Flotte prévue ou non, l'officier ASM prend la manoeuvre alors (il prend
la direction du navire pour optimiser la chasse du SM détecté). Voir à
ce propos les exercices proposés dès le premier entraînement avec "688i
Hunter-Killer" ou "SubCommand" , ou "Dangerous Waters" (DW) , ces
simulateurs , jeux vidéo PC grand public -grand mais averti- jeux ou plûtot simulateurs assez réalistes
de sous-marins d'attaque nucléaires US ou Russes. Ces "jeusimus" sont bien connus
et pratiqués par les Sous-Mariniers Français et Américains en
exercice ou en retraite, pour mieux se préparer ou se maintenir au
contact du monde sous-marin du SONAR .... !
On pourra aller voir à propos du SONAR, de la propagation sous-marine, et des opérations SM associées, le document (en Anglais mais très intéressant) de 38 pages "le livre BLEU des opérations sous-marines ", ainsi que 3 autres documents concernant la détection des cibles et le simulateur Dangerous Waters lui-même, sur les forums des 3 sites mille-sabords.com , subguru.com , et commanders-academy.com . Ce livre BLEU a été créé pour aider les participants aux simulateurs de sous-marins "688i Hunter/Killer" , "Subcommand" , et "Dangerous Waters" : On y trouve non seulement des conseils pour bien utiliser "son sous-marin", mais tout un cours sur le SONAR et sur la propagation sous-marine, tout à fait complémentaire de ces pages du site nareva.info . |